
上學期在 Harvard 修了「統計機器 … More
Sharing my idea about business analytics, machine learning, and data science.
上學期在 Harvard 修了「統計機器 … More
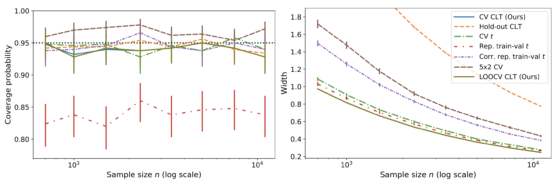
交叉驗證 (cross validati … More
今天想跟大家介紹的論文是 2019 年刊 … More
今天想要跟大家分享一篇很有趣的論文— D … More
最近在研究客戶留存的問題時,看到了 Ne … More
在「機器學習中的貝氏定理:生成模型與判別 … More

在前一篇文章中,我們討論了在不平衡資料的 … More

不平衡資料 (Imbalanced Da … More

最近有位讀者透過粉專私訊詢問: 讀了一篇 … More
之前我朋友在找機器學習相關的工作時,遇到 … More